ouch Sensor
Touch Sensor คือ อุปกรณ์ตรวจวัดที่ใช้ลักษณะการตอบสนองโดยการกดปุ่ม
การนำไปใช้งาน
เราสามารถใช้ Touch Sensor ในการตรวจจับการชน หรือใช้เป็นปุ่มในการเริ่มทำงานของโปรแกรม
การดูค่าของ Touch Sensor
เราสามารถดูค่าของ Touch Sensor ได้ที่เมนู View
หากบนหน้าจอแสดงค่า 0 แปลว่า Touch Sensor ไม่ถูกกด
หากบนหน้าจอแสดงค่า 1 แปลว่า Touch Sensor ถูกกด
Sound Sensor
Sound Sensor ทำหน้าที่ตรวจจับเสียงเป็นระดับเดซิเบล(Decibel)
สามารถตรวจจับเสียงได้ทั้ง dB และ dBA
- dBA คือ เสียงที่มนุษย์สามารถได้ยิน
- dB คือ เสียงทั้งหมด รวมถึงเสียงที่สูงหรือต่ำไปเกินกว่าที่มนุษย์จะได้ยินด้วย
Sound Sensor สามารถตรวจจับเสียงได้สูงสุด 90 dB
การอ่านค่าของ Sound Sensor จะแสดงเป็นเปอร์เซ็นต์ (%)
ระดับเสียง
- 4 - 5% - ห้องเงียบๆ
- 5 - 10% - มีเสียงคนพูดอยู่ไกลๆ
- 10 - 30% - เสียงเมื่อมีคนคุยกันในระยะ 1 เมตร หรือเปิดเพลงไม่ดังมาก
- 30 - 100% - เสียงเพลงดังมาก หรือมีคนมาตะโกนใส่เซ็นเซอร์
การนำไปใช้งาน
เราสามารถใช้ Sound Sensor ในการตรวจจับเสียง เช่น การตบมือ
การดูค่าของ Sound Sensor
เราสามารถดูค่าของ Sound Sensor ได้ที่เมนู View
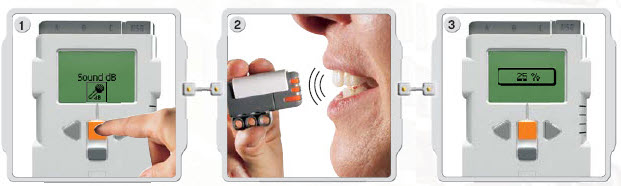
- เข้าไปที่เมนู View แล้วเลือก Sound dB
- ลองส่งเสียงใส่ Sound Sensor
- อ่านค่าบนหน้าจอ NXT
Light Sensor
Light Sensor ทำหน้าที่ตรวจจับความมืดและแสงสว่าง
การนำไปใช้งาน
เราสามารถใช้ Light Sensor ในการวัดสีของสิ่งของ หรือใช้ในการเดินตามเส้น
การดูค่าของ Light Sensor
เราสามารถดูค่าของ Light Sensor ได้ที่เมนู View
หากเลือก Reflected Light จะทำให้ Light Sensor ส่องแสงสีแดง
และวัดแสงที่สะท้อนกลับมา เราสามารถใช้ในการตรวจจับสีได้
แต่ถ้าเลือก Ambient Light จะไม่มีแสงออกมาจาก Light Sensor
โดย Light Sensor จะวัดแสงโดยรอบของมันเท่านั้น
เราสามารถนำมาใช้ตรวจสอบความสว่างและความมืดของห้องได้
Ultrasonic Sensor
Ultrasonic Sensor ทำหน้าที่ตรวจจับวัตถุที่อยู่ตรงหน้ามัน
สามารถวัดระยะห่างจากตัวเซ็นเซอร์กับวัตถุได้
Ultrasonic Sensor ทำงานโดยใช้หลักการเดียวกันกับค้างคาว นั่นก็คือ ตรวจวัดระยะห่าง โดยการส่งคลื่นเสียงออกไป แล้ววัดระยะเวลาที่คลื่นเสียง สะท้อนกลับมา โดย Ultrasonic Sensor สามารถวัดระยะทางได้ทั้งในหน่วยนิ้ว และหน่วยเซ็นติเมตร และสามารถวัดระยะห่างจากวัตถุได้ตั้งแต่ 0 - 2.5 เมตร โดยมีความคลาดเคลื่อนเพียง ± 3 เซ็นติเมตรเท่านั้น
วัตถุแข็งที่มีขนาดใหญ่ จะทำให้อ่านค่าได้ดีที่สุด ส่วนวัตถุนุ่มๆ หรือมีพื้นผิวโค้ง หรือบางมาก จะทำให้เซ็นเซอร์ตรวจจับได้ยาก
การนำไปใช้งาน
เราสามารถใช้ Ultrasonic Sensor ในการหลบหลีกสิ่งกีดขวาง
การดูค่าของ Ultrasonic Sensor
เราสามารถดูค่าของ Ultrasonic Sensor ได้ที่เมนู View
- เข้าเมนู View, แล้วเลือกเมนูที่เป็นสัญลักษณ์ Ultrasonic แล้วเลือกพอร์ตที่เสียบเซ็นเซอร์นี้ไว้
- ลองนำวัตถุต่างๆ มาไว้หน้าเซ็นเซอร์
- อ่านค่าจากหน้าจอของ NXT
Interactive Servo Motor
Interactive Servo Motor ทำให้หุ่นยนต์สามารถเคลื่อนที่ได้
นอกจากนี้ ยังมีเซ็นเซอร์วัดการหมุนของมอเตอร์ในตัว ทำให้ หุ่นยนต์ NXT สามารถควบคุมการหมุนได้อย่างแม่นยำ เซ็นเซอร์วัดการหมุนของมอเตอร์สามารถวัดการหมุนของมันได้เป็นองศา หรือนับเป็นรอบก็ได้ โดยที่การหมุน 1 รอบเท่ากับ 360 องศา
การนำไปใช้งาน
เราสามารถใช้ Interactive Servo Motor ในการขับเคลื่อนหุ่นยนต์ และบังคับส่วนประกอบอื่นๆ ของหุ่นยนต์
การดูค่าของ Interactive Servo Motor
เราสามารถดูค่าของ Interactive Servo Motor ได้ที่เมนู View
- เข้าเมนู View, แล้วเลือกเมนู Motor Rotations
- ประกอบล้อดังรูปต่อเข้ากับมอเตอร์
- ทำการหมุนล้อ
- อ่านค่าจากหน้าจอของ NXT ที่มา :http://krunisit.rwb.ac.th/sensors.html#last

 Touch Sensor คือ อุปกรณ์ตรวจวัดที่ใช้ลักษณะการตอบสนองโดยการกดปุ่ม
Touch Sensor คือ อุปกรณ์ตรวจวัดที่ใช้ลักษณะการตอบสนองโดยการกดปุ่ม
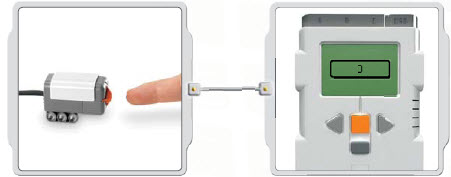 หากบนหน้าจอแสดงค่า 0 แปลว่า Touch Sensor ไม่ถูกกด
หากบนหน้าจอแสดงค่า 0 แปลว่า Touch Sensor ไม่ถูกกด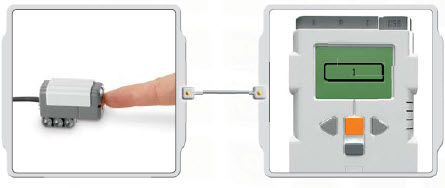 หากบนหน้าจอแสดงค่า 1 แปลว่า Touch Sensor ถูกกด
หากบนหน้าจอแสดงค่า 1 แปลว่า Touch Sensor ถูกกด Sound Sensor ทำหน้าที่ตรวจจับเสียงเป็นระดับเดซิเบล(Decibel)
Sound Sensor ทำหน้าที่ตรวจจับเสียงเป็นระดับเดซิเบล(Decibel) Light Sensor ทำหน้าที่ตรวจจับความมืดและแสงสว่าง
Light Sensor ทำหน้าที่ตรวจจับความมืดและแสงสว่าง
 หากเลือก Reflected Light จะทำให้ Light Sensor ส่องแสงสีแดง
หากเลือก Reflected Light จะทำให้ Light Sensor ส่องแสงสีแดง แต่ถ้าเลือก Ambient Light จะไม่มีแสงออกมาจาก Light Sensor
แต่ถ้าเลือก Ambient Light จะไม่มีแสงออกมาจาก Light Sensor Ultrasonic Sensor ทำหน้าที่ตรวจจับวัตถุที่อยู่ตรงหน้ามัน
Ultrasonic Sensor ทำหน้าที่ตรวจจับวัตถุที่อยู่ตรงหน้ามัน
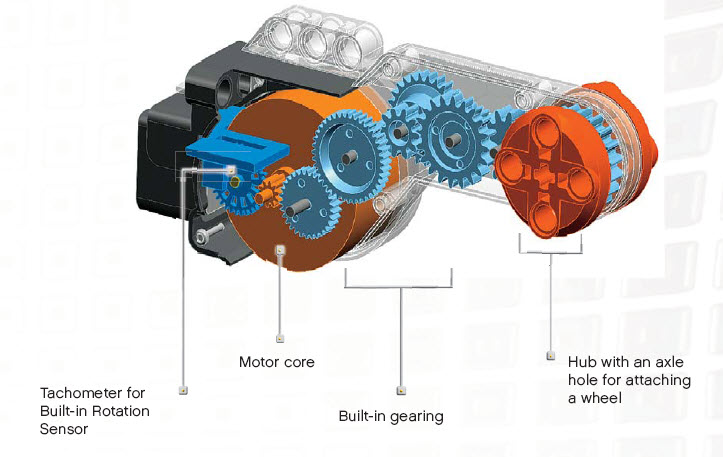 Interactive Servo Motor ทำให้หุ่นยนต์สามารถเคลื่อนที่ได้นอกจากนี้ ยังมีเซ็นเซอร์วัดการหมุนของมอเตอร์ในตัว ทำให้ หุ่นยนต์ NXT สามารถควบคุมการหมุนได้อย่างแม่นยำ เซ็นเซอร์วัดการหมุนของมอเตอร์สามารถวัดการหมุนของมันได้เป็นองศา หรือนับเป็นรอบก็ได้ โดยที่การหมุน 1 รอบเท่ากับ 360 องศา
Interactive Servo Motor ทำให้หุ่นยนต์สามารถเคลื่อนที่ได้นอกจากนี้ ยังมีเซ็นเซอร์วัดการหมุนของมอเตอร์ในตัว ทำให้ หุ่นยนต์ NXT สามารถควบคุมการหมุนได้อย่างแม่นยำ เซ็นเซอร์วัดการหมุนของมอเตอร์สามารถวัดการหมุนของมันได้เป็นองศา หรือนับเป็นรอบก็ได้ โดยที่การหมุน 1 รอบเท่ากับ 360 องศา
ไม่มีความคิดเห็น:
แสดงความคิดเห็น